软件定时器
jstl
静息态
ratio-test
自述
记事本
数据压缩
外贸独立站
批量替换
DDD领域驱动设计
reference手册
SAP 归档删除
splunk
validation
适航
宠物猫店管理系统
高级IO
hue
mysql 使用dump
计算机图像处理
点云处理
2024/4/11 23:53:14
【ArcGIS微课1000例】0060:ArcGIS打开las格式点云数据的方法
文章目录 1. 使用上下文菜单创建 LAS 数据集2. 使用地理处理工具创建 LAS 数据集3. 显示LAS数据集LAS 数据集是位于文件夹中的独立文件,并且引用 LAS 格式的激光雷达数据和用于定义表面特征的可选表面约束要素。ArcGIS中,可使用创建 LAS 数据集工具或 ArcCatalog 中文件夹的上…

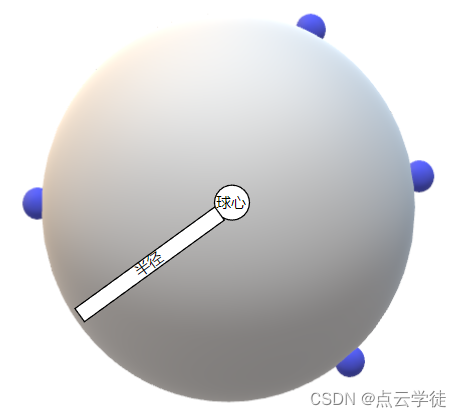
PCL点云处理之最小二乘球面点云拟合(直接拟合法,完整实验)(二百三十一)
PCL点云处理之最小二乘球面点云拟合(直接拟合法,完整实验)(二百三十一) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍
现在假设有这样一群点云,它们分布在一个球的表面,可能并不严格,带有些许噪声,此时我们需要计算球心坐标和球的半径。(这里提供完整的实验过…
3D点云之语义分割(相关官方示例介绍)
之前在博客中提到,会考虑用深度学习来对3D点云进行处理,接下来迈出脚步,先整几个例子来熟悉它。例子原型来源于官网,博主在其基础上做了一些代码修改。
一. 例子参考
1. Keras中的资源
Code examples 2.openvinotoolkit
open_…
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十六)
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十五六) 一、算法介绍二、使用步骤1.代码2.效果一、算法介绍
写论文当然用RANSAC的优化变种算法MSAC啊,RANSAC太土太LOW了哈哈
MSAC算法(M-estimator Sample Consensus)是RANSAC(Random Sample Consensus)的一种…
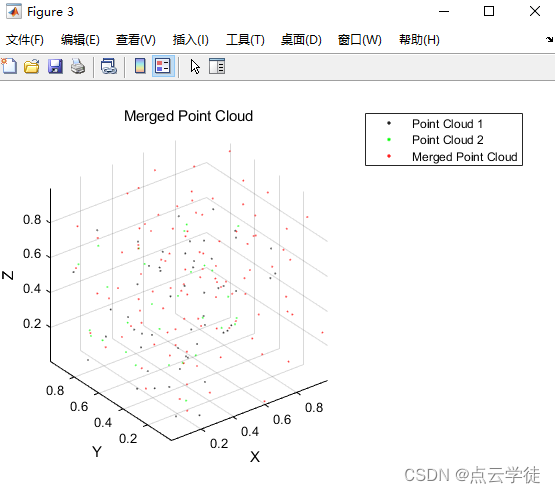
MATLAB 公共区域的点云合并(46)
MATLAB 公共区域的点云合并(46) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
点云配准后,或者公共区域存在多片点云对场景进行冗余过量表达时,我们需要将点云进行合并,Matlab点云工具中提供了这样的合并函数,通过指定网格步长,对初始点云进行过滤。
函数主要实…
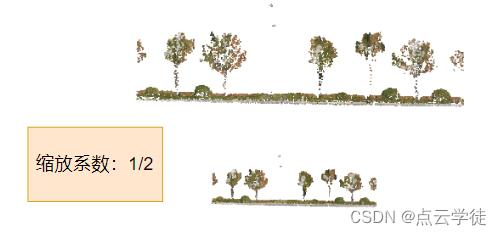
Open3D 反算点云缩放系数(21)
Open3D 反算点云缩放系数(21) 一、算法介绍二、算法实现1.方法12.方法2(通用)一、算法介绍
上一章按照指定的系数,对点云进行了等比例缩放,这里输入缩放后的两块点云,反算二者之间的缩放系数。
二、算法实现
已知使用的俩点云是1/2的缩放关系,用于验证计算结果是否…

点云处理---最小矩形包围盒
包围体是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包围体类型包括球体、轴对齐包围盒…
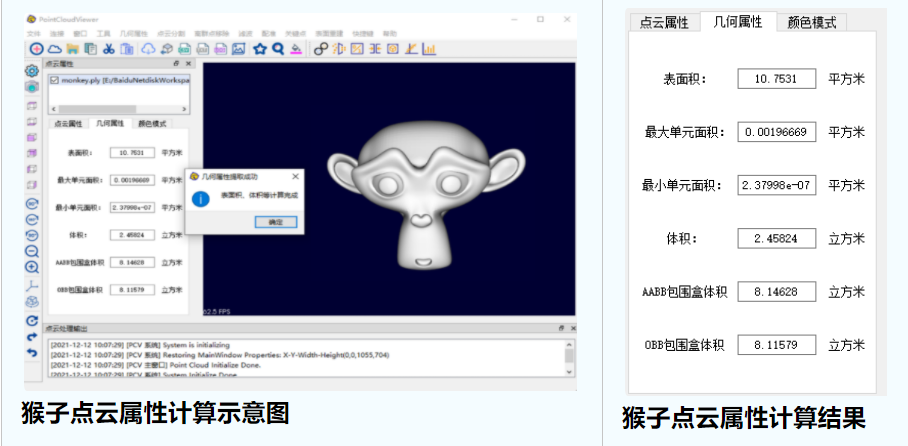
开源,点云处理及三维重建软件(Point Cloud Viewer, PCV)的设计与实现
GitHub地址:point-cloud-viewer GitCode地址:point-cloud-viewer 文章目录 使用教程以及相关工具库Step 1 搭建环境Step 2 使用Cmake构建工程Step3 使用VS 编写code并编译执行 点云处理及三维重建软件(PCV)的设计与实现一, 软件总体设计1.1 软…
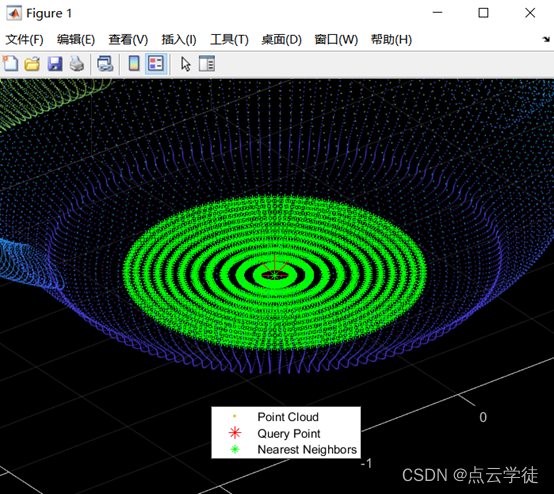
MATLAB 搜索某一点的R邻域点 (13)
MATLAB 搜索某一点的R邻域点 (13) 前言一、算法介绍1.1 :无序点云的R邻域点搜索1.2 :有序点云的R邻域点搜索二、具体实现示例2.1 算法一 (含详细注释)2.2 算法二 (含详细注释)前言
在点云处理中,最基本的算法之一就是搜索某一点的近邻点,这在重叠区域确定,点云密度…
Open3D 计算点云空间分布密度(16)
Open3D 计算点云空间分布密度(16) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍
使用八叉树来估计点云密度可以通过统计每个体素内部的点的数量来实现。Open3D库中的VoxelGrid数据结构可以帮助完成这一任务。
二、算法实现
1.代码
代码如下(示例): import open3…

手把手教学基于简单神经网络的激光雷达点云车辆检测(附代码)
准备工作
pythonmatlabKITTI数据集激光雷达部分参考文献(本文基本按照该文献方式处理):邓淇天. 基于激光雷达和视觉传感器融合的障碍物识别技术研究[D]. 南京: 东南大学, 2019.整个项目已push至github(数据部分上传,模…
MATLAB 点云中心化 (40)
MATLAB 点云中心化 一、算法介绍二、算法实现一、算法介绍
使用点云集合中的坐标计算质心,这里将其作为中心,将每个点坐标减去该中心坐标,即可得到中心化的点云,这在很多处理中是必须进行的一个步骤:相当于点云移动到以质心为原点的坐标系 (主要是计算质心和点云偏移两个…
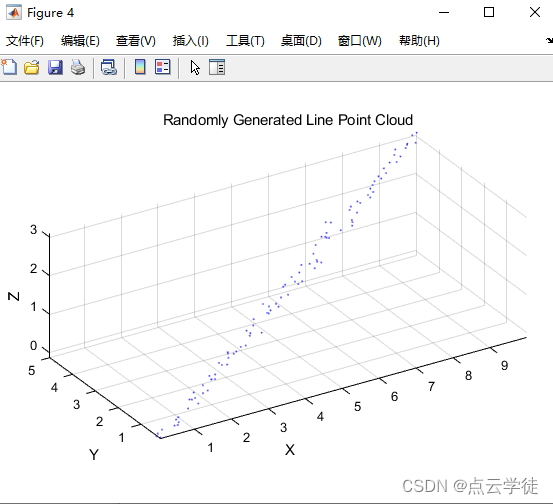
MATLAB 自定义生成直线点云(详细介绍) (47)
MATLAB 自定义生成直线点云 (详细介绍)(47) 一、算法介绍二、具体步骤二、算法实现1.代码2.效果一、算法介绍
通过这里的直线生成方法,可以生成模拟直线的点云数据,并通过调整起点、终点、数量和噪声水平等参数来探索不同类型的直线数据。这种方法可以用于测试、验证和开…
PCL点云处理之计算两条直线间最短连线的端点 (二百零三)
PCL点云处理之计算两条直线间最短连线的端点 (二百零三) 一、算法目的二、具体实现1.代码2.结果一、算法目的
条件:给定两条直线,直线采用直线上一点和直线方向来确定 要求:求两条直线间的最短连线线段,获取它的两个端点
具体的算法实现如下,提供了示例直线和计算结果进…
MATLAB 随机生成含噪球面点云(45)
MATLAB 随机生成含噪球面点云(45) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
指定球模型的中心和半径,在其表面随机生成一些含有高斯噪声的点云,可以用于一些算法的实验使用。下面是具体的实现法和最后的效果,如果生成严格按照球面分布的点云,那就把噪声去掉。…
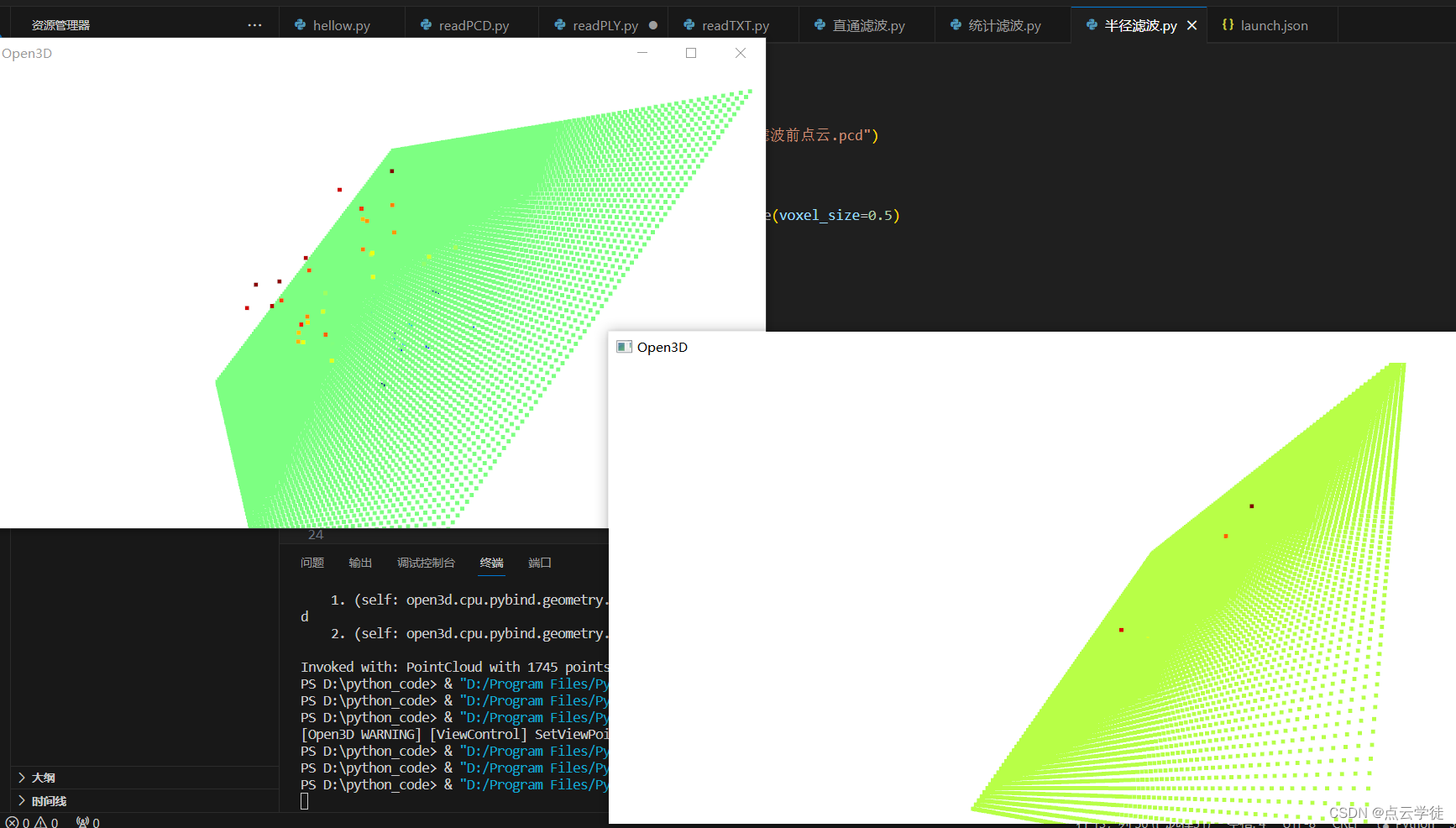
Open3D 基于半径滤波去除噪点(6)
Open3D 基于半径滤波去除噪点(6) 一、原理介绍二、具体实现1.代码 一、原理介绍
半径滤波是一种常用的点云滤波方法,它通过在点云中采样一个指定半径内的点来减少数据量和去除噪声。在半径滤波中,对于给定半径大小,点…
MATLAB 点与三角形的相对位置判断 (33)
MATLAB 点与三角形的相对位置判断 (33) 一、点在三角形的内外判断二、点在三角形的边上判断一、点在三角形的内外判断
返回1代表在内部,返回0代表在外部
具体效果可以自己调整P的坐标进行查看,这里要注意,如果点在边上,下面代码会将该点判断为在三角形内部,所以还是要…
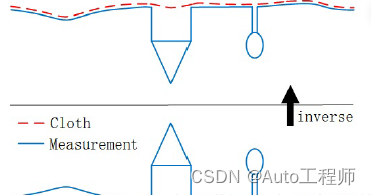
Python点云处理(十九)点云地面点提取——CSF布料模拟算法
目录 0 简述1 算法原理2 具体步骤3 实现0 简述
对于点云地面点滤波,众多传统算法滤波效果容易受到地形特征的影响(通常在复杂场景及陡峭地形区域滤波效果较差)且常常需要用户对数据有较为丰富的先验知识来进行设置滤波器中的各种参数。为了解决这些问题,张吴明教授等人提出…
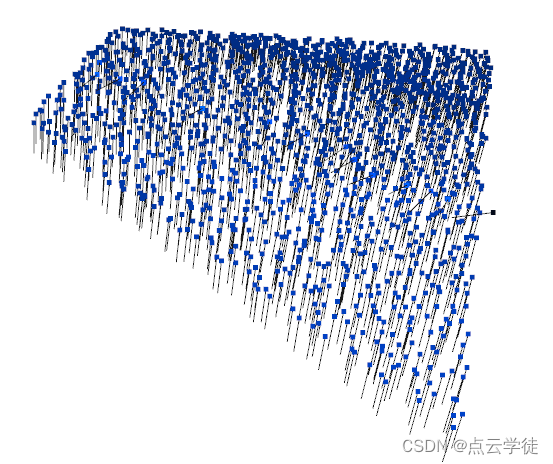
Open3D 基于最小生成树的法线定向 (27)
Open3D 基于最小生成树的法线定向 (27) 一、算法介绍二、算法实现一、算法介绍
法线计算的方向通常都存在方向问题,用Open3D估计的点云法线,是在每个点的局部进行拟合,估计的法线方向并不一致,Open3D提供了使用最小生成树调整法线到统一方向的方法,下面是具体的实现代码…
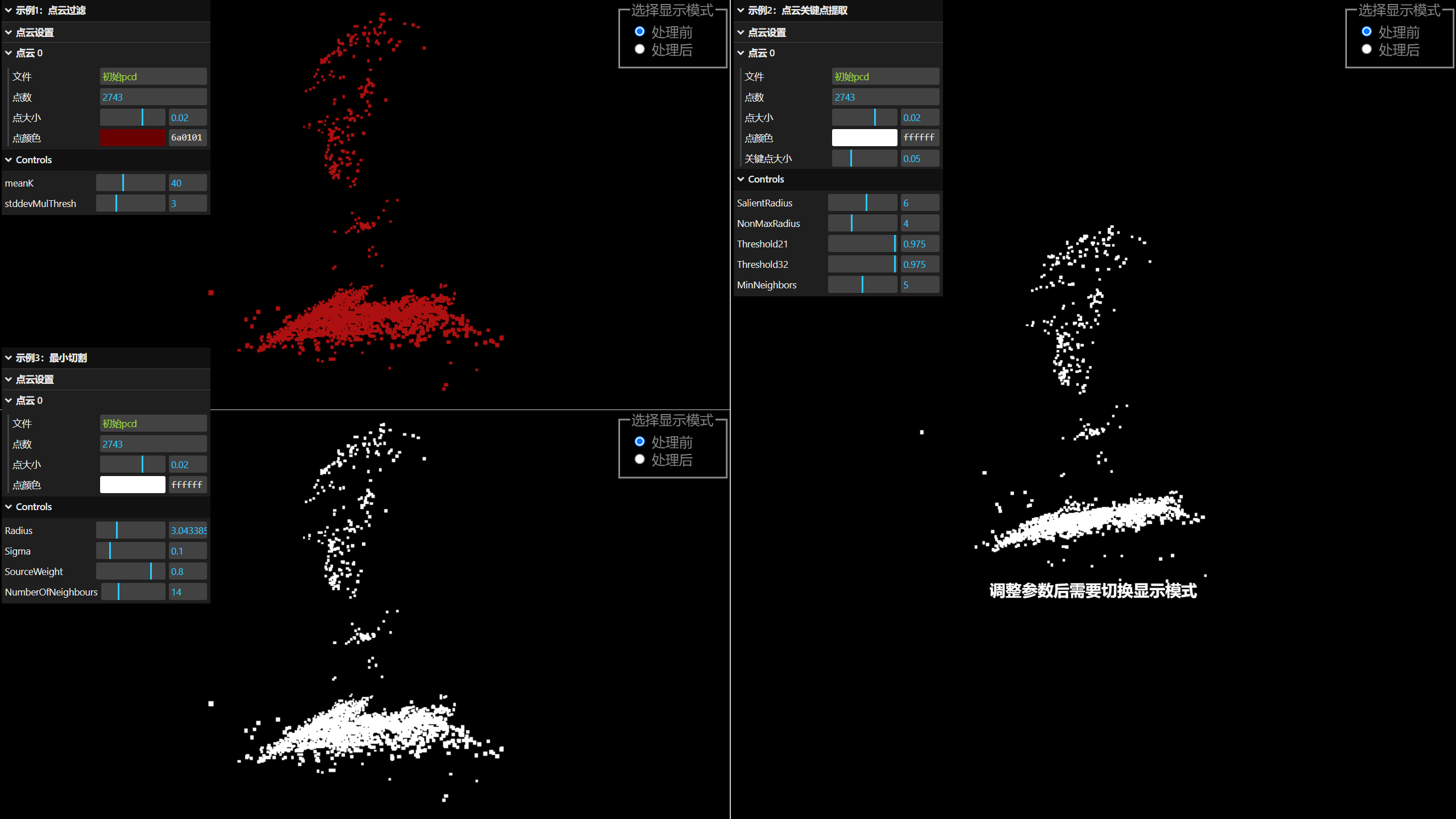
Three.js+pcl.js 实现Web端的点云处理+显示
1 功能实现
在前面我们实现了PCD的加载器的基础上,这次将加上 pcl.js —— 著名的PCL库的web版本,详情见https://pcl.js.org/,来处理我们加载上去的点云。
具体实现如下: 用户可以通过每个板块的右上角进行处理前 / 后的切换&am…
Python 点云处理总目录
一、点云滤波 原始点云包含过多噪点和冗余点,滤波和采样往往是点云预处理的必要步骤 1.滤波
直通滤波 统计滤波 半径滤波
2.采样
下采样抽稀
二、邻近搜索 如何组织点云快速获取当前点邻域范围,是面对海量点云保证处理速度的重要前提 3.KD树与八…
点云的最小外包围盒实现
系统ubuntu14.04
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/project_inliers.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/sample_consensus/method_type…
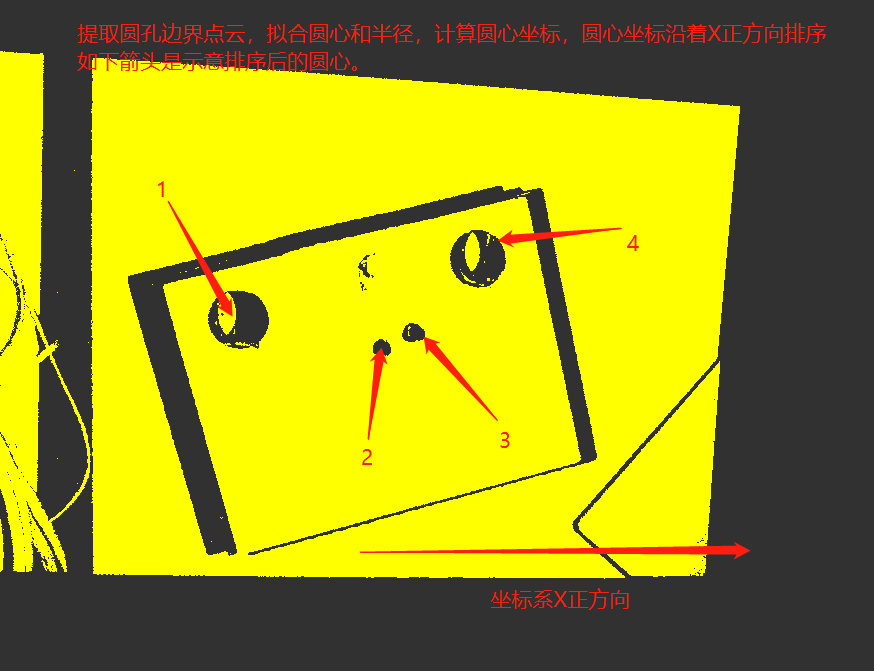
点云处理开发测试题目 完整解决方案
点云处理开发测试题目 文件夹中有一个场景的三块点云数据,单位mm。是一个桌子上放了一个纸箱,纸箱上有四个圆孔。需要做的内容是:
1. 绘制出最小外接立方体,得到纸箱的长宽高值。注意高度计算是纸箱平面到桌子平面的距离。 2. 计算出纸箱上的四个圆的圆心坐标和半径,对圆…
《点云处理》 点云去噪
前言
通常从传感器(3D相机、雷达)中获取到的点云存在噪点(杂点、离群点、孤岛点等各种叫法)。噪点产生的原因有不同,可能是扫描到了不想要扫描的物体,可能是待测工件表面反光形成的,也可能是相…
MATLAB 按照索引提取点云 (56)
MATLAB 按照索引提取点云 (53) 一、算法介绍二、算法实现1.代码一、算法介绍
原始点云经过某种处理得到了一组索引,例如原始点云的索引为0 1 2 3 4 ,其中通过处理确认索引2 3 是需要进一步处理的点云,通过索引提取的方法从原始点云中,将2 3 对应的点云提取出来得到新的点…
MATLAB 统计滤波(去除点云噪声)(55)
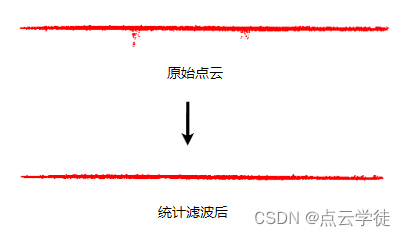
MATLAB 统计滤波法(去除点云噪声)(55) 一、算法介绍二、算法实现1.原理2.代码一、算法介绍
点云统计滤波,是一种常用的去噪点方法,原始的点云数据中包含多种噪点,无法直接使用,往往需要通过一些方法去除噪点,而统计滤波在这方面的使用非常广泛常见,下面是去噪点后的…
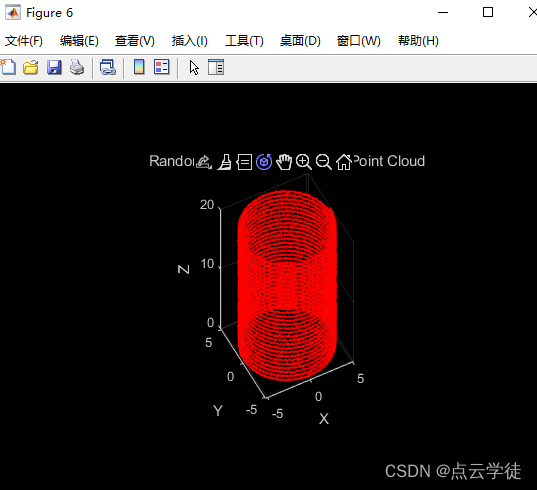
MATLAB 自定义生成圆柱点云(49)
MATLAB 自定义生成圆柱点云(49) 一、算法介绍二、具体实现1.代码2.效果一、算法介绍
按照一些提前指定的圆柱参数,自定义生成圆柱点云,可添加噪声,用于后续的实验测试
二、具体实现
1.代码
代码如下(示例):
% 指定圆柱的参数
radius = 5; % 圆柱半径
height = 20…

MATLAB 主成分分析PCA拟合平面点云 (42)
MATLAB 主成分分析PCA拟合平面点云 (42) 一、算法介绍二、算法实现一、算法介绍
主成分分析(Principal Component Analysis,PCA)是一种常用的数据降维和特征提取技术。它的主要思想是通过线性变换将数据投影到一个新的坐标系,使得在新的坐标系中数据的方差最大化。在3D点…
MATLAB 最小二乘直线拟合 (35)
MATLAB 最小二乘直线拟合 (35) 一、算法介绍二、算法实现1.版本12.版本2一、算法介绍
点云近似于直线分布,但相对要散乱一些,此时,最小二乘直线拟合,是一种最常用的拟合方法,可以从中找到最优的直线方程,用于描述点云的分布情况。网上介绍最小二乘原理的文章很多,这里…
Open3D 生成含高斯噪声的球面点云 (29)
Open3D 生成含高斯噪声的球面点云 (29) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
在某个中心和半径已知的球表面,随机生成一系列带有高斯噪声的球面点云。
二、算法实现
1.代码
代码如下(示例):
import open3d as o3d
import numpy as npnum_points = 100…
Python点云处理(十七)点云地面点提取——基于格网算法
目录 0 简述1 算法流程2 优缺点3 实现4 效果5 结语0 简述
提取地面点是点云数据分析和处理中的重要任务,而点云格网法是一种常用的地面点提取方法。点云格网法(Grid-based Method),通过将点云数据划分为网格单元,根据高程值分析来实现地面点的提取。 1 算法流程
步骤1:…
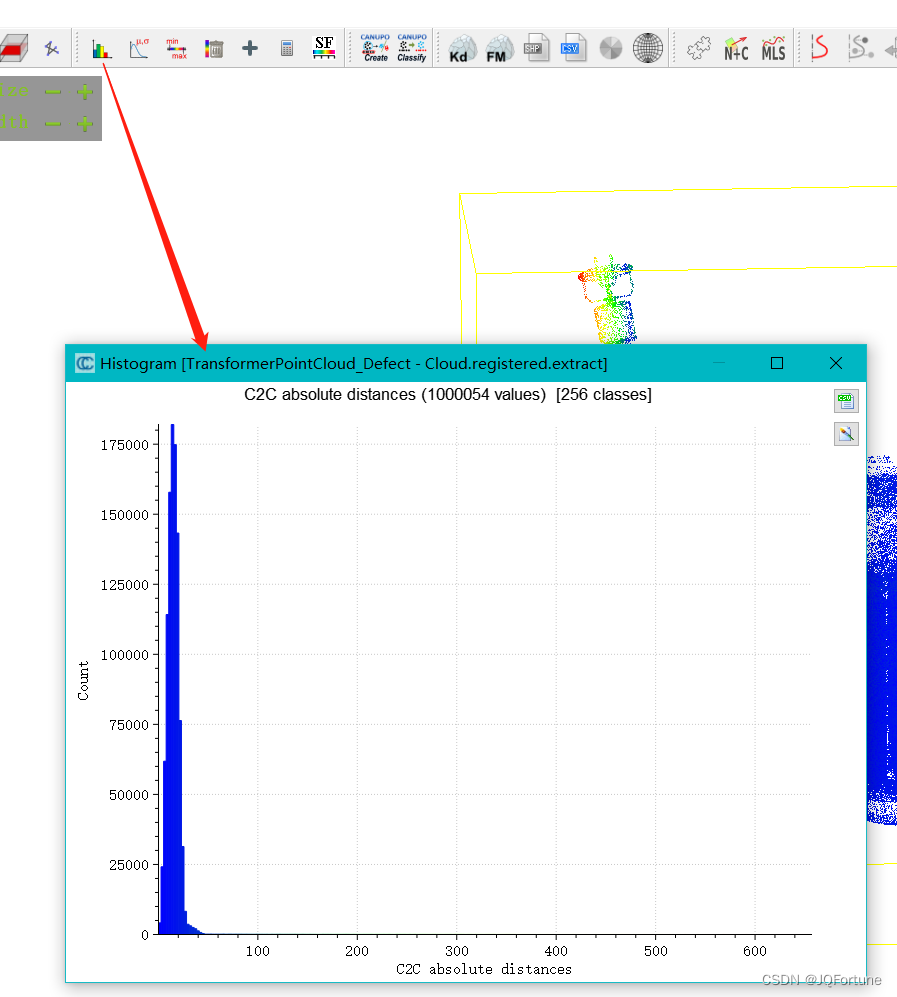
CloudCompare比较点云并统计特定距离误差范围内的点数
文章目录 1.导入点云2.旋转或平移某个点云3.配准点云3.点云差异比较4.统计特定误差范围内的点云数量 1.导入点云
点击文件夹图标,选择要导入到CC(CloudCompare)处理的两个点云,最终可看到点云目录树: 2.旋转或平移某个…

MATLAB 自定义均值滤波 (53)
MATLAB 自定义均值滤波 (53) 一、算法介绍二、算法实现1.原理2.代码一、算法介绍
均值滤波,是一种常见的点云平滑算法,改善原始点云的数据质量问题,MATLAB自带的工具似乎不太友好,这里提供自定义实现的点云均值滤波算法,具体效果如下所示:
均值滤波前: 均值滤波后:…
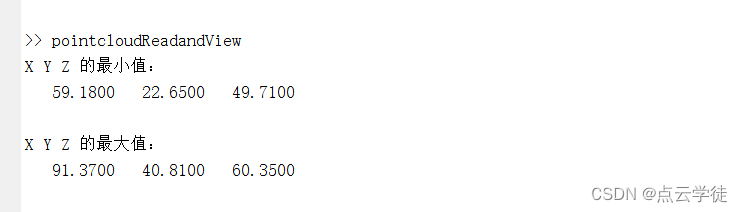
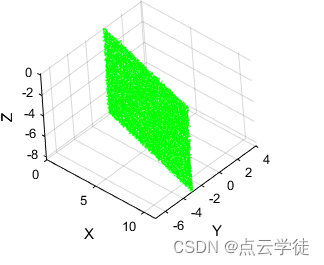
MATLAB 计算点云坐标的最大最小值 (38)
MATLAB 计算点云坐标的最大最小值 (38) 一、算法介绍二、算法实现1.代码一、算法介绍
沿着X Y Z三个坐标轴方向,点云坐标存在对应的最大最小值,这在计算点云体积或者其他方面有使用,这里使用MATLAB快速获取xmax xmin ymax ymin zmax zmin6个最大最小值 二、算法实现
1.代…
PCL点云处理之重复随机采样一致性(RRANSAC法)平面拟合(二百三十七)
PCL点云处理之重复随机采样一致性(RRANSAC法)平面拟合(二百三十七) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍
pcl::SAC_RRANSAC"是 PCL库中的一个方法,是 RANSAC 方法的改进版本,通过多次重复采样和模型拟合来提高鲁棒性。RRANSAC 的思想是在 RANSAC 的基…
MATLAB 四点确定唯一球面参数(44)
MATLAB 四点确定唯一球面参数(44) 一、算法简介二、算法实现1.代码2.结果一、算法简介
根据给定的四个点,快速拟合获取球的中心和半径,具体代码如下:
二、算法实现
1.代码
代码如下(示例):
point1 = [0.0, 0.0, 0.0]
【Lidar】Cloud Compare介绍安装包
CloudCompare是一款基于GPL开源协议的3D点云处理软件,最初被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能。在2005年后,CloudCompare实现了点云和三角形网格之间的比较。 Cl…
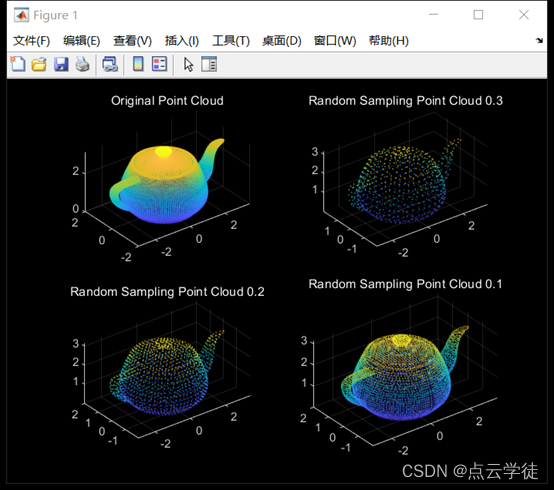
MATLAB 点云均匀体素下采样(6)
MATLAB 点云均匀体素下采样的不同参数效果测试 (6) 一、实现效果二、算法介绍三、函数说明3.1 函数3.2 参数四、实现代码(详细注释!)一、实现效果
不同参数调整下的均匀体素下采样结果如下图所示,后续代码复制黏贴即可: 分别为0.3m,0.2m,0.1m尺度下的格网下采样结果…
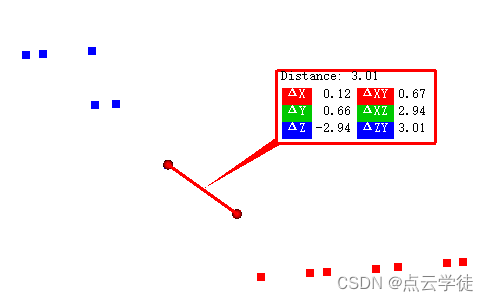
MATLAB 计算两片点云间的最小距离(2种方法) (39)
MATLAB 计算两片点云间的最小距离 (39) 一、算法介绍二、算法实现1.常规计算方法2.基于KD树的快速计算一、算法介绍
假设我们现在有两片点云 1 和 2 ,需要计算二者之间的最小距离,这里提供两种计算方法,分别是常规计算和基于KD树近邻搜索的快速计算方法,使用的测试数据如…
MATLAB点云处理总目录
一、点云滤波 原始点云包含过多噪点和冗余点,滤波和采样往往是点云预处理的必要步骤 1.滤波
重复点去除 NAN或INF无效点去除 自定义半径滤波
2.采样
基于空间格网的点云抽稀 随机下采样 均匀体素下采样 非均匀体素下采样
二、邻近搜索 如何组织点云快速获取当前…